Аполлон PGNCS - Apollo PGNCS - Wikipedia



Аполлон система первичного наведения, навигации и управления (PGNCS) (произносится пинги) был замкнутым инерциальная система наведения это позволило Космический корабль Аполлон выполнять свои миссии, когда связь с Землей была прервана, либо как ожидалось, когда космический корабль находился за Луной, либо в случае сбоя связи. Аполлон командный модуль (См) и лунный модуль (LM), каждый был оснащен версией PGNCS. PGNCS и, в частности, его компьютер, были также командным центром для всех системных входов от LM, включая юстировочный оптический телескоп, радиолокационная система, инструкция перевод и вращение вводы устройств космонавтами, а также другие вводы от систем LM.
PGNCS был разработан Инструментальная лаборатория Массачусетского технологического института под руководством Чарльз Старк Дрейпер (его именем впоследствии была названа приборная лаборатория). Генеральный подрядчик PGNCS и производитель инерциальная единица измерения (ИДУ) был Подразделение Delco General Motors. PGNCS состоит из следующих компонентов:
- инерциальный измерительный блок (ИИУ)
- в Компьютер наведения Apollo (AGC)
- преобразователи для преобразования углов инерциальной платформы в сигналы, используемые для сервоуправления
- оптические блоки, один для CM и другой для LM
- механическая рама, называемая навигационной базой (или навигационной базой), для жесткого соединения оптических устройств и, в LM, радара сближения с IMU
- программное обеспечение AGC
Версии

CM и LM использовали один и тот же компьютер, инерциальную платформу и резольверы. Основным отличием был оптический блок. Навигационная база также была разной для каждого космического корабля, что отражало разную геометрию крепления. Свидание LM радар также был подключен к своей навигационной базе.
Существовало две версии PGNCS - Block I и Block II - соответствующие двум поколениям CM. После Аполлон I пожар, произошедший в блоке I CM, НАСА решили, что никакие дальнейшие миссии с экипажем не будут использовать Блок I, хотя миссии без экипажа использовали. Основные различия между блоком I и блоком II PGNCS включали замену электромеханические резольверы с полностью электронным дизайном и заменой навигационной базы Block I, которая была изготовлена из бериллий, с каркасом из алюминий трубка заполнена полиуретан мыло. Навигационные базы Block II были легче, дешевле и такими же жесткими.
Еще одно важное различие между блоком I и блоком II - ремонтопригодность. Первоначальной целью программы «Аполлон» было дать астронавтам возможность ремонтировать электронику. Соответственно, Block 1 PNGCS был разработан с множеством идентичных модулей, которые при необходимости можно было заменить запасными в полете. Однако условия повышенной влажности в кабинах экипажа и несчастные случаи при работе с жидкостями организма во время Близнецы 7 Миссия делать незапечатанные электрические соединения нежелательными. Ремонтопригодность была устранена в блоке II, и все блоки и электрические соединения были опломбированы.[1] Смертельный пожар Аполлона-1 только усилил эту озабоченность.
Компоненты PGNCS использовались Дрейпером для ВМС США. глубоководный спасательный автомобиль (DSRV).[2]
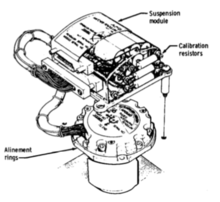
Инерциальная единица измерения

ИДУ было подвешено по трем осям. Самая внутренняя часть, стабильный элемент (SM), представляла собой 6-дюймовый бериллиевый куб с тремя гироскопы и три акселерометры установлен в нем. В контурах обратной связи используются сигналы от гироскопов через резольверы для управления двигателями на каждой оси. Этот сервопривод система удерживала стабильный элемент фиксированным относительно инерциальное пространство. Затем были интегрированы сигналы от акселерометров, чтобы отслеживать скорость и положение космического корабля. IMU был создан на основе системы наведения, разработанной Draper для Ракета Polaris.
Инерционные системы наведения не идеальны, и система Apollo дрейфовала на один миллирадиан в час. Таким образом, необходимо было периодически настраивать инерциальную платформу по звездам.
Оптические блоки


Оптический блок CM обладал точностью секстант (SXT), закрепленный на раме IMU, который мог измерять углы между звездами и ориентирами Земли или Луны или горизонтом. Он имел две линии обзора, 28-кратное увеличение и поле зрения 1,8 градуса. В оптический блок также входил сканирующий телескоп (SCT) с малым увеличением и широким полем обзора (60º) для наблюдения за звездами. Оптический блок может использоваться для определения положения и ориентации КМ в пространстве.

У LM вместо этого был юстировочный оптический телескоп (АОТ), по сути, перископ. Внешний элемент AOT представлял собой солнцезащитную призму, которую можно было поворачивать в одно из шести фиксированных положений относительно LM, чтобы покрыть большую часть лунного неба. Каждая позиция имела поле обзора 60º. При повороте положение AOT считывалось AGC; направив сетку на две разные звезды, компьютер мог определить ориентацию аппарата.[3]
Солнцезащитный козырек был добавлен в конце программы, в 1967 году, после того, как испытания и моделирование определили, что астронавты могут не видеть звезды на поверхности Луны из-за прямого солнечного света или света, рассеянного соседними частями LM, падающими на внешняя призма. Добавление солнцезащитного козырька позволило увеличить количество позиций обзора с трех до шести.[1]:п. 41 и далее

Программного обеспечения
Бортовое программное обеспечение наведения использовало Фильтр Калмана для объединения новых данных с прошлыми измерениями местоположения для получения оптимальной оценки местоположения космического корабля. Ключевой информацией была преобразование координат между элементом стабильной ИДУ и эталонной системе координат. В аргументе программы Аполлон эта матрица была известна как REFSMMAT (для «Ссылки на матрицу стабильных элементов»). В зависимости от фазы миссии использовались две опорные системы координат: одна с центром на Земле, а другая с центром на Луне.
Несмотря на слово «первичный» в названии, данные PGNCS не были основным источником навигационной информации. Данные отслеживания НАСА Сеть Deep Space был обработан компьютерами в Центре управления полетами с использованием наименьших квадратов алгоритмы. Полученные оценки положения и скорости были более точными, чем оценки, произведенные PGNCS. В результате астронавтам периодически предоставлялись обновления вектора состояния для ввода в AGC на основе наземных данных. PGNCS по-прежнему важна для поддержания ориентации космического корабля, для управления ракетами во время маневрирования, включая посадку и взлет на Луну, а также в качестве основного источника навигационных данных во время запланированных и неожиданных сбоев связи. PGNCS также провела проверку наземных данных.
Лунный модуль имел третье средство навигации - отменить систему наведения (AGS), построенный TRW. Это должно было использоваться в случае отказа PGNCS. AGS можно было использовать для взлета с Луны и встречи с командным модулем, но не для посадки. В течение Аполлон-13, после наиболее критического ожога около Луны AGS использовался вместо PGNCS, потому что он требовал меньше электроэнергии и охлаждающей воды.
Аполлон-11
Вовремя Аполлон-11 миссии, два сигнала тревоги PGNCS (1201 «Нет доступных зон VAC» и 1202 «Исполнительная тревога, нет основных комплектов») были переданы в центр управления полетом, когда 20 июля 1969 года предпринималась попытка первой высадки на Луну. одновременный сбор данных радара посадки и данных радара сближения. Персонал службы поддержки миссии пришел к выводу, что сигналы тревоги можно игнорировать и посадка прошла успешно.[4][5]
Смотрите также
- Приборный блок Saturn V - система наведения, используемая ракетами-носителями Apollo
Рекомендации
- ^ а б Холли, М. Д. (май 1976 г.). «Отчет об опыте работы Apollo - Системы наведения и управления: разработка первичной системы навигации и управления, NASA TN D-8287» (PDF). Космический центр Линдона Б. Джонсона, США. Национальное управление по аэронавтике и исследованию космического пространства.
- ^ Тихая война: холодная война, битва под морем, Джон Пина Крейвен, Саймон и Шустер, 2002, стр.120
- ^ Оптический телескоп для юстировки лунного модуля Apollo, Журнал Apollo Lunar Surface Journal
- ^ Эйлс, Дон (2004-02-06), Сказки от управляющего компьютера лунного модуля, получено 2017-10-01
- ^ "Журнал" Аполлон-11 "на поверхности Луны: программные сигналы тревоги". www.hq.nasa.gov. Получено 2017-04-16.
| Ракеты-носители |  | |
|---|---|---|
| Ракета-носитель составные части | ||
| Космический корабль | ||
| Космический корабль составные части | ||
| Скафандры | ||
| Лунная поверхность оборудование | ||
| Наземная поддержка | ||
| Церемониальный | ||
| Связанный | ||